
Serial Port Communication between PC and Arduino using Visual Basic.Net for Beginners

Serial Port Programming on Linux using Visual Basic.net and .NET Platform
Following the introduction of the open-source .NET platform by the .NET Foundation, supported by Microsoft, it became possible to develop .NET applications on platforms other than Windows, including Linux and macOS, using languages such as C# and Visual Basic .NET.
Simple Python tkinter (ttkbootstrap) GUI interface for serial port communication with Arduino
In this tutorial ,We will learn to build a simple crossplatform GUI based serial port communication with Arduino Microcontroller using Python and tkinter (ttkbootstrap).To make the interface look nice we will use the theme extension for tkinter called ttkbootstrap which provides modern flat style themes.
Native Serial Port Programming on Linux (Unix) system using C and terminos API
Submitted by Rahul.Sreedharan on 7 June 2015 - 11:17am
tutorial on programming the serial port on linux distros like ubuntu,fedora ,mint linux,debian
Hello Folks,
This is a tutorial on how to program the Serial Ports on your Linux box.Serial Ports are nice little interfaces on the PC which helps you to interface your embedded system projects using a minimum number of wires.In this tutorial we will write a small program that will send and receive ASCII characters to a microcontroller development board.
Serial Port Programming Tutorials
Cross Platform Python Serial Port Programming Tutorials
- Read more about Serial Port Programming Tutorials
- Log in to post comments
USB to Serial,RS232,RS485 Converter (USB2SERIAL V3.0)
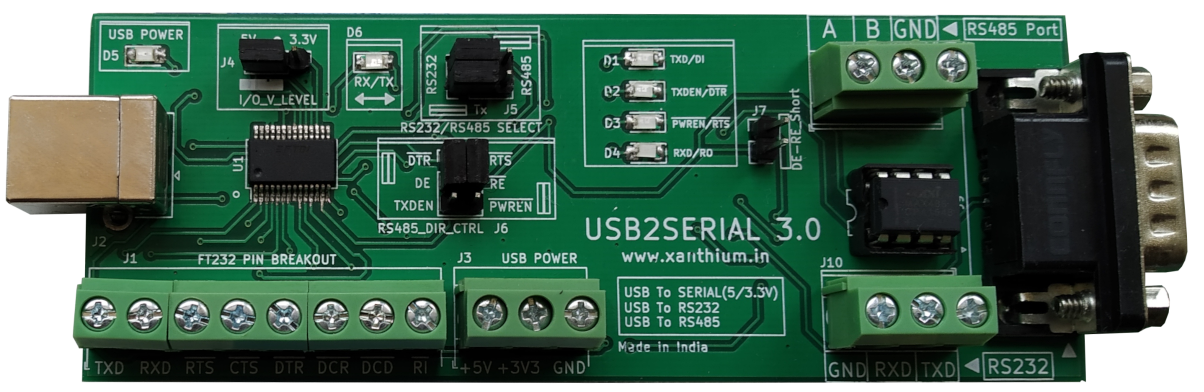
USB2SERIAL V3.0 is a FT232 based protocol converter which can be used as the following